近日,華西醫療機器人研究院精創石溪團隊與四川大學華西生物醫學大數據中心在人與機器人交互控制研究上取得重要進展,相關成果以A Robust Region Control Approach for Simultaneous Trajectory Tracking and Compliant Physical Human-Robot Interaction為題在國際頂級期刊IEEE Transactions on Systems, Man and Cybernetics: Systems(IEEE TSMC)上接收發表,該研究工作得到了由華西醫療機器人研究院與四川大學華西醫院共同承擔的四川省重點研發計劃項目資助。
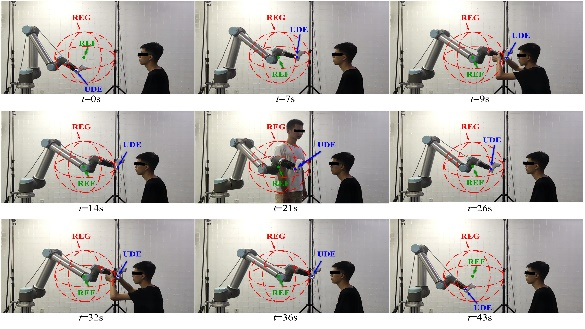
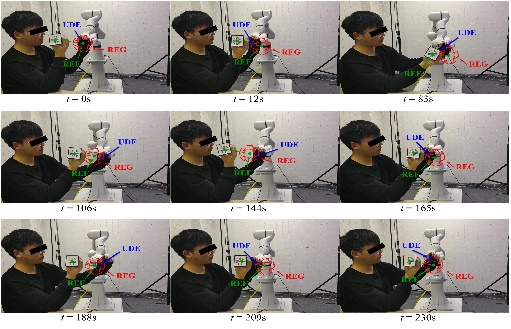
為了安全、順利地執行機器人輔助醫療任務,需要同時實現實時運動跟蹤控制和人與機器人的柔順物理交互。該論文為多自由度機械臂開發了基于不確定性和干擾估計器的魯棒區域跟蹤控制器。基于勢能函數求解得到區域反饋誤差,驅動機械臂末端執行器收斂到目標區域,在目標區域中實現安全柔順的物理人機交互。利用反步控制方法,區域反饋誤差被無縫集成到基于不確定性和干擾估計器的控制框架中,實現模型不確定性的估計和補償,從而在控制器實現時只需要較少的模型信息。所提出的方法通過軌跡跟蹤,體溫測量,雙邊康復等實驗進行驗證,為多自由度機械臂在康復、護理等醫療場景中的實際應用提供了新思路。
該研究成果發表的IEEE Transactions on Systems, Man and Cybernetics: Systems是國際公認的自動化領域頂級期刊,屬于中科院SCI期刊分區1區Top期刊,影響因子11.471,主要刊登系統工程、控制與計算機科學方向的高水平前沿研究成果。精創石溪團隊由多名國家及省級海外高層次人才組成,圍繞康復及輔助機器人產業方向,努力提升智能康復及輔助技術的可及性,目前已牽頭承擔國家自然科學基金、國家重點研發計劃子課題、四川省重點研發計劃等10余項國家及省級科研項目,發表30余篇國際期刊論文,公開及授權國家發明專利20余項,擁有人機剛柔耦合運動技術、人機協同柔順控制技術、多模態生理信號柔性感知技術等全棧自研技術,研制出LightCare康復機器人系列和LightSense生理信號柔性傳感器系列,打造融合可穿戴物聯網與多機器人協作的數字化主動健康生態。團隊已與華西醫院生物醫學大數據中心、華西醫院康復醫學中心、華西醫院國家老年疾病臨床醫學研究中心、面向關鍵器件的創新成果產業化公共服務平臺(工信部)、四川省機械研究設計院(集團)有限公司開展深度合作,旨在形成多學科多領域交叉融合的研究成果和產業項目。
精創石溪團隊康復機器人成果


有限公司")
有限公司")